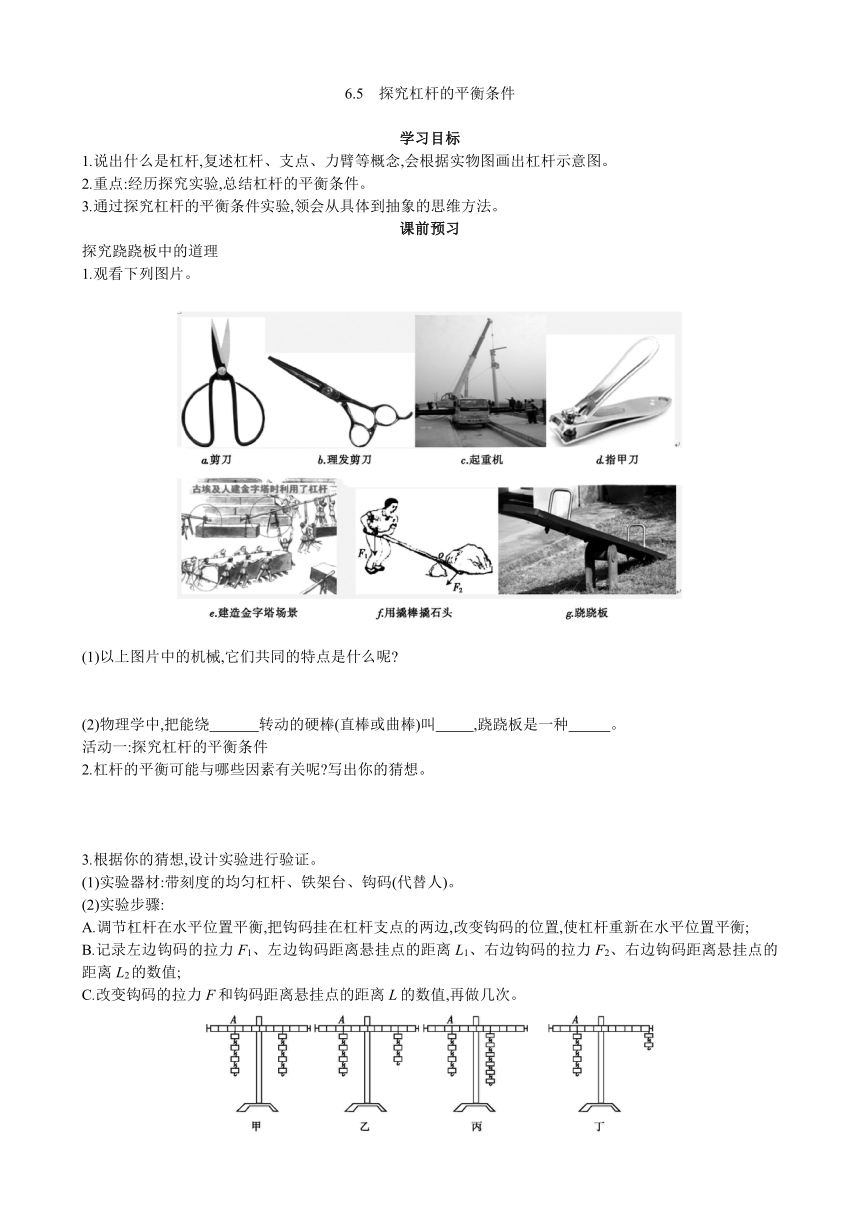
资源简介 6.5 探究杠杆的平衡条件学习目标1.说出什么是杠杆,复述杠杆、支点、力臂等概念,会根据实物图画出杠杆示意图。2.重点:经历探究实验,总结杠杆的平衡条件。3.通过探究杠杆的平衡条件实验,领会从具体到抽象的思维方法。课前预习探究跷跷板中的道理1.观看下列图片。(1)以上图片中的机械,它们共同的特点是什么呢 (2)物理学中,把能绕 转动的硬棒(直棒或曲棒)叫 ,跷跷板是一种 。 活动一:探究杠杆的平衡条件2.杠杆的平衡可能与哪些因素有关呢 写出你的猜想。 3.根据你的猜想,设计实验进行验证。(1)实验器材:带刻度的均匀杠杆、铁架台、钩码(代替人)。(2)实验步骤:A.调节杠杆在水平位置平衡,把钩码挂在杠杆支点的两边,改变钩码的位置,使杠杆重新在水平位置平衡;B.记录左边钩码的拉力F1、左边钩码距离悬挂点的距离L1、右边钩码的拉力F2、右边钩码距离悬挂点的距离L2的数值;C.改变钩码的拉力F和钩码距离悬挂点的距离L的数值,再做几次。(3)观察图甲可以发现,当两边钩码的个数(拉力F) ,且钩码到悬挂点的距离(L) 时,杠杆水平静止。 (4)比较图甲、乙、丙、丁可以发现, ,杠杆水平静止。 4.结论:当左边钩码的拉力F1和左边钩码距离悬挂点的距离L1的 与右边钩码的拉力F2和右边钩码距离悬挂点的距离L2的 相等时,杠杆平衡。 5. 如图所示,杠杆绕着转动的点,叫做 ;一般情况下,F1叫做 ,F2叫做 ;从支点到力的作用线的距离L1和L2叫做 。动力的力臂叫做 ,阻力的力臂叫做 。杠杆在 和 的作用下,处于 状态,叫做杠杆平衡。 6.杠杆的平衡条件: ,也可以表述为 ,用公式表示为 。 课堂探究1.*讨论:画力臂方法2. 如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO=2OB.固定O点,使OB处于水平位置,此时B端挂一重为40 N的物体,要使杠杆不发生转动,至少需在A端施加F= N的力,在图上画出此时力F的方向。3.在下图中画出F1的力臂和力臂L2对应的力F2.参考答案课前预习1.(1)这些机械共同点:都有一根硬棒能够绕固定点转动。(2)某一固定点 杠杆 杠杆2.(1)与两边物体的质量有关;(2)与物体到杠杆支点的距离有关。 3.(3)相等 相等 (4)当左边钩码的拉力F1与左边钩码距离悬挂点的距离L1的乘积和右边钩码的拉力F2与右边钩码距离悬挂点的距离L2的乘积相等时 4. 乘积 乘积5. 支点 动力 阻力 力臂 动力臂 阻力臂 动力 阻力 静止6. 杠杆的动力臂是阻力臂的几倍,杠杆的动力F1就是阻力F2的几分之一 动力×动力臂=阻力×阻力臂 F1×L1=F2×L2或=课堂探究1.(1)找支点O;(2)画力的作用线(虚线);(3)画力臂(虚线,过支点垂直力的作用线作垂线);(4)标力臂(大括号)。2.20 方向通过A点垂直于AO斜向下3. 展开更多...... 收起↑ 资源预览
 资源预览
资源预览
 资源预览
资源预览