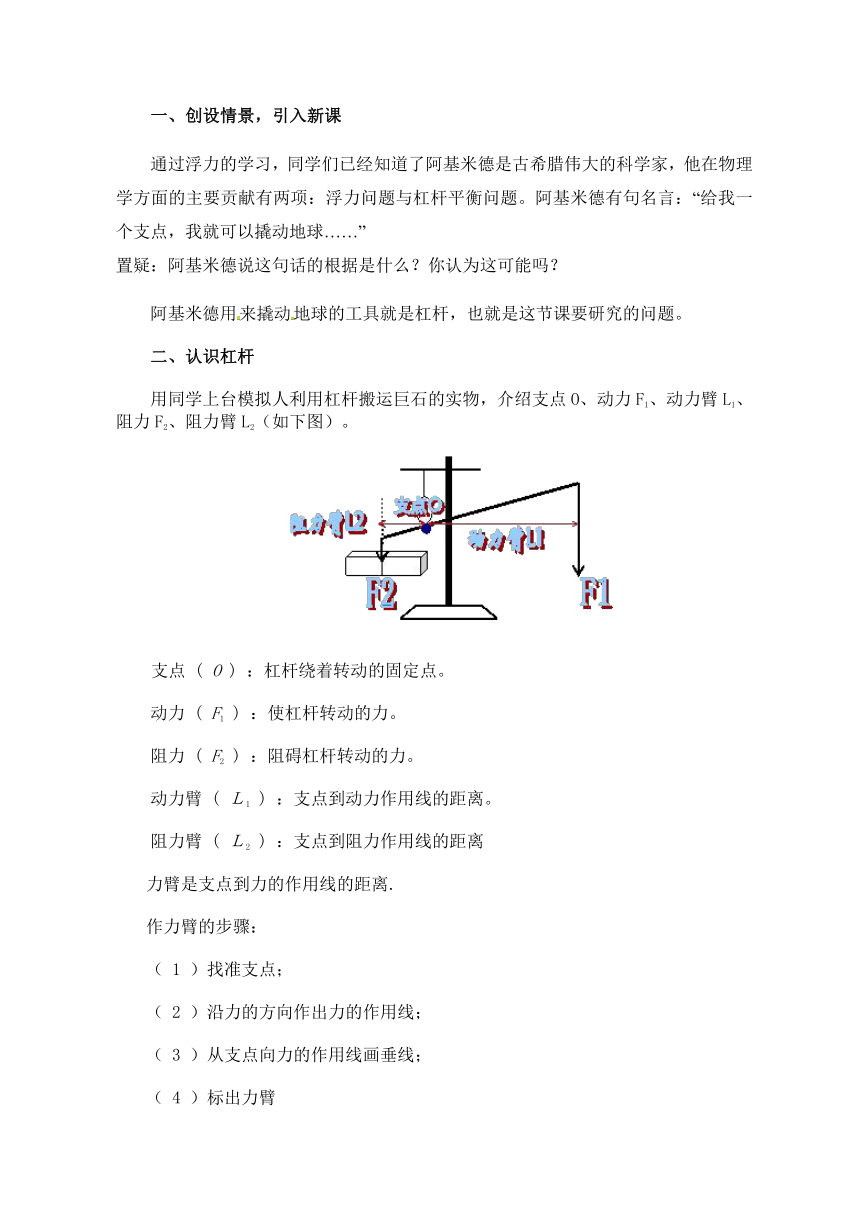
资源简介 《杠杆》教学设计【 教 学 目 标 】1、知识与技能(1)认识杠杆,知道杠杆的几个概念,会确认并画出力臂;(2)知道杠杆平衡条件;(3)了解杠杆的一些应用。2、过程与方法(1)通过观察和实验,了解杠杆的构造以及杠杆中的几个概念。(2)经历探究杠杆平衡条件的过程,进一步学会提出问题,分析归纳实验数据。3、情感、态度与价值观(1)关心社会生产、生活,保持对自然现象的好奇心, 并乐于探索自然现象和日常生活中的物理学道理。(2)逐步建立辩证唯物主义的世界观。(3)通过了解杠杆的应用,进一步认识物理的应用价值,提高学习物理的兴趣。【 教 学 重 点 】引导学生通过探究得出杠杆平衡条件。【 教 学 难 点 】1.通过实验,理解力臂概念。2.杠杆平衡条件的运用。【 教 学 手 段 】 多媒体课件【实验器材及教学媒体的选择与使用】铁架台,木棍,砖块,绳子,弹簧测力计,钩码,杠杆原理演示器,三角板,多媒体设备等。【 教 学 过 程 】一、创设情景,引入新课通过浮力的学习,同学们已经知道了阿基米德是古希腊伟大的科学家,他在物理学方面的主要贡献有两项:浮力问题与杠杆平衡问题。阿基米德有句名言:“给我一个支点,我就可以撬动地球……”置疑:阿基米德说这句话的根据是什么?你认为这可能吗?阿基米德用来撬动地球的工具就是杠杆,也就是这节课要研究的问题。二、认识杠杆用同学上台模拟人利用杠杆搬运巨石的实物,介绍支点O、动力F1、动力臂L1、阻力F2、阻力臂L2(如下图)。支点 ( O ) :杠杆绕着转动的固定点。动力 ( F1 ) :使杠杆转动的力。阻力 ( F2 ) :阻碍杠杆转动的力。动力臂 ( L1 ) :支点到动力作用线的距离。阻力臂 ( L2 ) :支点到阻力作用线的距离力臂是支点到力的作用线的距离.作力臂的步骤:( 1 )找准支点;( 2 )沿力的方向作出力的作用线;( 3 )从支点向力的作用线画垂线;( 4 )标出力臂三、探究:杠杆平衡条件1.用上图实物,演示并讲解什么叫杠杆平衡。2.提出问题:如果将支点右移,观察L1、L2如何变化?F1又会如何变化?反之,又会怎样变化呢?(学生凭经验应该说能回答正确)。3.探究:杠杆平衡条件学生讨论实验步骤。步骤如下:(1)将杠杆挂在铁架台上,观察是否在水平位置平衡(静止);若不是,可调节平衡螺母,使之水平平衡。(2)在杠杆支点的左边挂一定量的钩码,在支点右边也挂上钩码,直至杠杆平衡为止。(3)重复多做几次平衡实验,得到不同数据。(4)将数据记录下来,分析得出结论。记录的是杠杆上的格数,如果不在水平位置平衡,那么臂长就不等于格数×格长了。开始实验,完成探究任务。老师在学生探究过程中进行巡视,发现问题及时提出,让学生自己去分析解决问题。完成实验后,任意选择五组,请组中作记录的学生将结果说出来。 将五组中的实验数据任意各取一组填入表格中,讨论可得到什么结论(杠杆平衡条件)。教师可提出各种猜想,加减乘除关系都可。可能有学生得到其他关系式,但不适合所有数据,因此它不是杠杆平衡条件。学生分组认真探究,将结果填入自己设计好的表格中,同时对得到的结论进行分析讨论。对公式F1 L1=F2 L2进行变形,可以得到比例式 ,它的含义是:如果动力臂是阻力臂的几倍,那么动力就是阻力的几分之一。学生:动力×动力臂=阻力×阻力臂。 即F1×L1=F2×L24.巩固与拓展(1)在上面实验中,如果将两个钩码(质量均为50g)挂在右端8cm处,则在右端20cm处要用多大的力才能使杠杆处于平衡状态?方向如何?(2)用弹簧测力计演示、验证。(3)设问:如果将弹簧测力计改为斜向上拉,则读数会如何变化?(4)学生猜想,教师演示,设问:为什么会这样变化?(5)引导学生找出斜向上拉时,F1、F2以及L1、L2在哪里?F2与L2的乘积变了没有?比较L1是变大了还是变小了?四、杠杆的应用1.引导学生画出以下几个杠杆的动力、动力臂、阻力、阻力臂。 (1)羊角锤拔钉子 (2) 收渔网 (3) 天平2、比较以上三种杠杆中的动力、动力臂的大小,学习三种类型的杠杆。省力杠杆:L1>L2,省力但费距离,如(1)费力杠杆:L1等臂杠杆:L1=L2,既不省力也不省距离,如(3)3、投影仪展示课本中图6—1,6—8中的杠杆,哪个省力,哪个费力?4、请同学们举例,生活中都有哪些杠杆,分别属于什么类型?有没有既省力又省距离的杠杆呢?五、设计练习1、 通过探究,你能理解阿基米德的名言吗 请就此写一篇短文。2、 用杠杆知识分析、理解天平的原理和调整过程。六、板书设计杠 杆 1 、杠杆:在力的作用下,能够绕着支撑点旋转的结实物体,叫杠杆。 2 、杠杆的几个概念: 支点 ( O ) :杠杆绕着转动的固定点。 动力 ( F1 ) :使杠杆转动的力。 阻力 ( F2 ) :阻碍杠杆转动的力。 动力臂 ( L1 ) :支点到动力作用线的距离。阻力臂 ( L2 ) :支点到阻力作用线的距离。3、杠杆平衡的条件: 动力×动力臂 = 阻力×阻力臂 F1L1 = F2L2 展开更多...... 收起↑ 资源预览
 资源预览
资源预览
 资源预览
资源预览