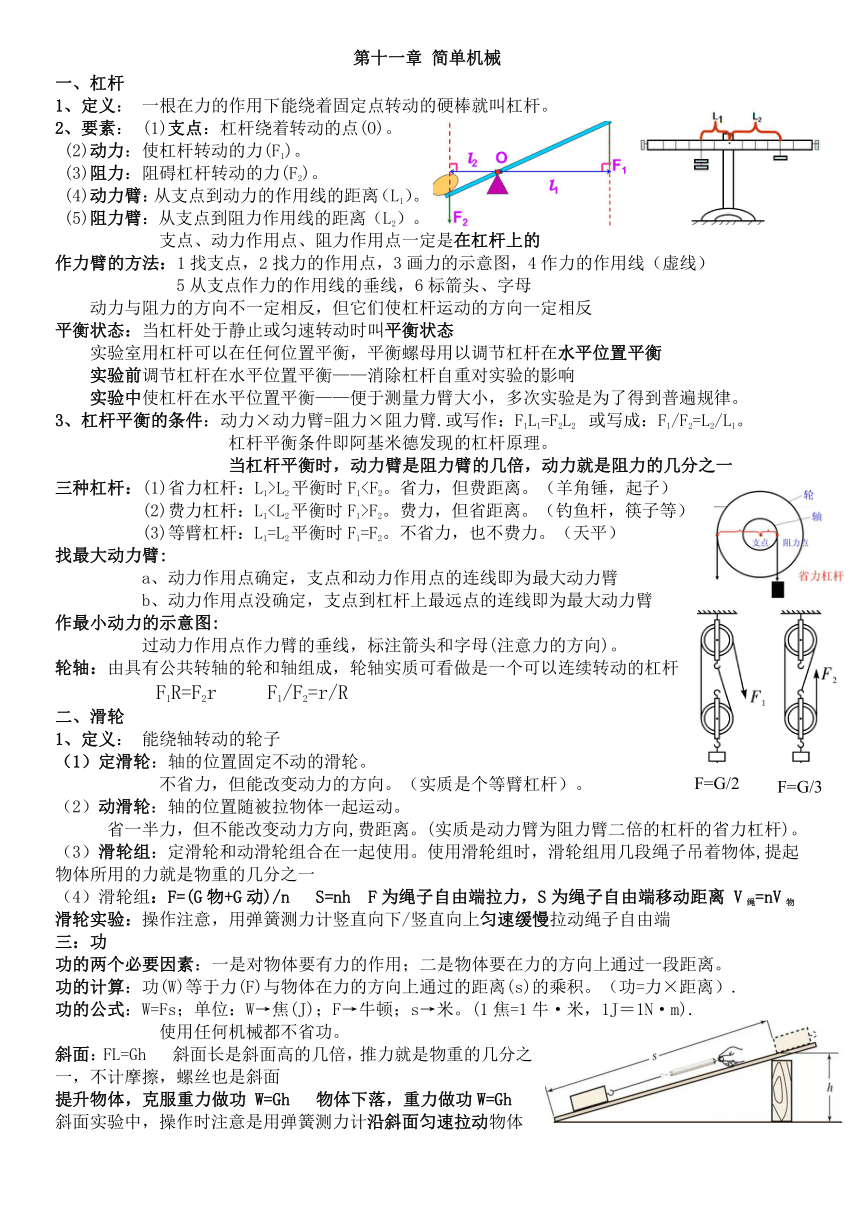
资源简介 第十一章 简单机械一、杠杆1、定义: 一根在力的作用下能绕着固定点转动的硬棒就叫杠杆。2、要素: (1)支点:杠杆绕着转动的点(O)。(2)动力:使杠杆转动的力(F1)。(3)阻力:阻碍杠杆转动的力(F2)。(4)动力臂:从支点到动力的作用线的距离(L1)。(5)阻力臂:从支点到阻力作用线的距离(L2)。支点、动力作用点、阻力作用点一定是在杠杆上的作力臂的方法:1找支点,2找力的作用点,3画力的示意图,4作力的作用线(虚线)5从支点作力的作用线的垂线,6标箭头、字母动力与阻力的方向不一定相反,但它们使杠杆运动的方向一定相反平衡状态:当杠杆处于静止或匀速转动时叫平衡状态实验室用杠杆可以在任何位置平衡,平衡螺母用以调节杠杆在水平位置平衡实验前调节杠杆在水平位置平衡——消除杠杆自重对实验的影响实验中使杠杆在水平位置平衡——便于测量力臂大小,多次实验是为了得到普遍规律。3、杠杆平衡的条件:动力×动力臂=阻力×阻力臂.或写作:F1L1=F2L2 或写成:F1/F2=L2/L1。杠杆平衡条件即阿基米德发现的杠杆原理。当杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之一三种杠杆:(1)省力杠杆:L1>L2平衡时F1(2)费力杠杆:L1F2。费力,但省距离。(钓鱼杆,筷子等)(3)等臂杠杆:L1=L2平衡时F1=F2。不省力,也不费力。(天平)找最大动力臂:a、动力作用点确定,支点和动力作用点的连线即为最大动力臂b、动力作用点没确定,支点到杠杆上最远点的连线即为最大动力臂作最小动力的示意图:过动力作用点作力臂的垂线,标注箭头和字母(注意力的方向)。轮轴:由具有公共转轴的轮和轴组成,轮轴实质可看做是一个可以连续转动的杠杆F1R=F2r F1/F2=r/R二、滑轮1、定义: 能绕轴转动的轮子(F=G/3) (F=G/2)(1)定滑轮:轴的位置固定不动的滑轮。不省力,但能改变动力的方向。(实质是个等臂杠杆)。动滑轮:轴的位置随被拉物体一起运动。省一半力,但不能改变动力方向,费距离。(实质是动力臂为阻力臂二倍的杠杆的省力杠杆)。滑轮组:定滑轮和动滑轮组合在一起使用。使用滑轮组时,滑轮组用几段绳子吊着物体,提起物体所用的力就是物重的几分之一滑轮组:F=(G物+G动)/n S=nh F为绳子自由端拉力,S为绳子自由端移动距离 V绳=nV物滑轮实验:操作注意,用弹簧测力计竖直向下/竖直向上匀速缓慢拉动绳子自由端三:功功的两个必要因素:一是对物体要有力的作用;二是物体要在力的方向上通过一段距离。功的计算:功(W)等于力(F)与物体在力的方向上通过的距离(s)的乘积。(功=力×距离).功的公式:W=Fs;单位:W→焦(J);F→牛顿;s→米。(1焦=1牛·米,1J=1N·m).使用任何机械都不省功。斜面:FL=Gh 斜面长是斜面高的几倍,推力就是物重的几分之一,不计摩擦,螺丝也是斜面提升物体,克服重力做功 W=Gh 物体下落,重力做功W=Gh斜面实验中,操作时注意是用弹簧测力计沿斜面匀速拉动物体四:功率功率只能表示机械做功的快慢,不能说明机械做功的多少。定义:功与做功所用时间的比 P=W/t 单位是J/s 专门单位W(瓦特) 1W=1J/s千瓦与兆瓦:1kW=1000W 1MW=103kW马力:1min内把约15t物体举高月0.3m所需的功率1马力=1500kg×9.8N/kg×0.3m/60s = 735W五:机械效率有用功:我们的目的,我们所需要做的功额外功:并非我们所需,但又不得不做的功(一定小于100%)总 功:总功等于有用功和额外功之和W总=W有用+W额外对于滑轮组:有用功是把物体提升相应高度而做的功W有用= Gh总功即作用在绳子自由端的力与绳子自由端移动距离的乘积W总= FS=Fnh提高机械效率的方法:减轻滑轮与绳子自重、减小摩擦(此两点旨在减少额外功),增加物重(提高有用功占比)补充:滑轮组的机械效率与提升的速度无关,与提升的高度无关,与滑轮组绕绳方式无关。公式汇总:杠杆平衡条件F1L1=F2L2F1/F2=L2/L1轮轴:F1R=F2r F1/F2=r/R滑轮 F=(G物+G动)/n S=nh V绳=nV物 n:与动滑轮接触绳子股数(对于滑轮组:=00%)功计算公式 W=FS 单位:J 变形:F=W/S S=W/F重力做功或克服重力做功:W=Gh功率 W=Pt 单位:W 1W=1J/S 变形:P=W/t t=W/PP=W/t=FS/t=FV(F为动力,V为速度) F=P/V V=P/F机械效率变形:W有=ηW总 W总=W有/η对于滑轮组η=G/nF η=G/(G+G动) η=G/nf如图1请作出物体A所受重力的示意图和使杠杆在图示位置平衡的最小力F(保留作图痕迹)。(F)(作图F=f/2) (图3) (图2) (图1)如图2标出支点O,并作出动力臂。(作图F=f/3)如图3标出支点O,并作出力臂。 展开更多...... 收起↑ 资源预览
 资源预览
资源预览
 资源预览
资源预览