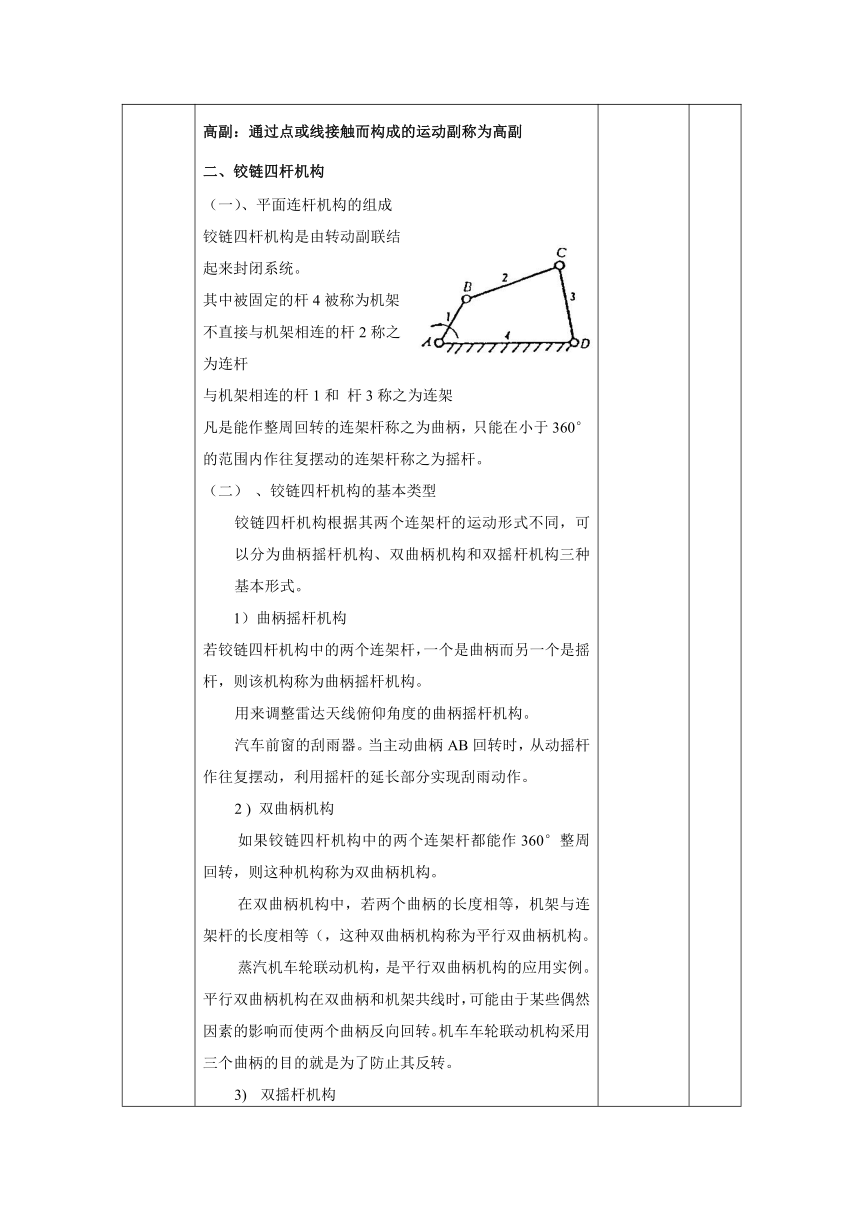
资源简介 学科 机械基础课 题 6-1 平面连杆机构教学目标 知识目标 掌握铰链四杆机构的基本类型技能目标 达到正确判断铰链四杆机构的能力情感目标 树立正确的学习观念教材重、难点 重 点 铰链四杆机构的基本类型难 点 铰链四杆机构的基本类型教学组织与过程 第一步:展示图片,引入新课 第二步:通过实物图片与讲授。让学生掌握各种基本概念 第三步:通过讲授,理解掌握铰链四杆机构的基本类型 第四步:通过课后习题,进一步巩固知识已具备知识 只看见过生活中的实列教学方法 教法 实物观察;多媒体演示学法 观察;理解记忆教学媒体及辅件 多媒体课件附后Ⅰ 教学过程环节 教师活动 学生活动 备注准 备 组织学生到多媒体教室,组织课堂秩序 带上相关书、笔、笔记本引 入 1、展示生活中的各种机构 2、思考下列图形的运动形式,观察滑块与机架,两齿轮的接触形式有什么不同? 1 让学生举手回答 2 让学生观看视频 引入新的任务新 课 一、运动副及其分类 运动副:将两个构件组成的既具有一定约束又具有一定相对运动的联接。 两构件组成的运动副,是通过点、线或面接触来实现的。 按照接触方式不同,通常把运动副分为低副(如曲柄滑块机构)和高副(齿轮副)两类 。 低副:通过面接触而构成的运动副称为低副 高副:通过点或线接触而构成的运动副称为高副 二、铰链四杆机构 (一)、平面连杆机构的组成 铰链四杆机构是由转动副联结起来封闭系统。 其中被固定的杆4被称为机架 不直接与机架相连的杆2称之为连杆 与机架相连的杆1和 杆3称之为连架 凡是能作整周回转的连架杆称之为曲柄,只能在小于360°的范围内作往复摆动的连架杆称之为摇杆。 、铰链四杆机构的基本类型 铰链四杆机构根据其两个连架杆的运动形式不同,可以分为曲柄摇杆机构、双曲柄机构和双摇杆机构三种基本形式。 1)曲柄摇杆机构 若铰链四杆机构中的两个连架杆,一个是曲柄而另一个是摇杆,则该机构称为曲柄摇杆机构。 用来调整雷达天线俯仰角度的曲柄摇杆机构。 汽车前窗的刮雨器。当主动曲柄AB回转时,从动摇杆作往复摆动,利用摇杆的延长部分实现刮雨动作。 2 ) 双曲柄机构 如果铰链四杆机构中的两个连架杆都能作360°整周回转,则这种机构称为双曲柄机构。 在双曲柄机构中,若两个曲柄的长度相等,机架与连架杆的长度相等(,这种双曲柄机构称为平行双曲柄机构。 蒸汽机车轮联动机构,是平行双曲柄机构的应用实例。平行双曲柄机构在双曲柄和机架共线时,可能由于某些偶然因素的影响而使两个曲柄反向回转。机车车轮联动机构采用三个曲柄的目的就是为了防止其反转。 双摇杆机构 铰链四杆机构的两个连架杆都在小于360°的角度内作摆动,这种机构称为 双摇杆机构。 (三)、铰链四杆机构的演化 1.转动副化成移动副 2.扩大转动副 3.取不同构件为机架 (四)、平面四杆机构有曲柄的条件 曲柄存在的条件 由上述以知,在铰链四杆机构中,能作整周回转的连架杆称为曲柄。而曲柄是否存在。则取决于机构中各杆的长度关系,即要使连架杆能作整周转动而成为曲柄,各杆长度必须满足一定的条件,这就是所谓的曲柄存在的条件。 可将铰链四杆机构曲柄存在的条件概括为: 连架杆与机架中必有一个是最短杆; 最短杆与最长杆长度之和必小于或等于其余两杆长度之和。 上述两条件必须同时满足,否则机构中无曲柄存在。根据曲柄条件,还可作如下推论: (1)若铰链四杆机构中最短杆与最长杆长度之和必小于或等于其余两杆长度之和,则可能有以下几种情况: a.以最短杆的相邻杆作机架时,为曲柄摇杆机构; b.以最短杆为机架时,为双曲柄机构; c.以最短杆的相对杆为机架时,为双摇杆机构。 (2)若铰链四杆机构中最短杆与最长杆长度之和大于其余两杆长度之和,则不论以哪一杆为机架,均为双摇杆机构。 (五)、平面四杆机构急回特性 曲柄摇杯机构中,当曲柄A B沿顺时针方向以等角速度转过φ1时,摇杆CD自左极限位置C1D摆至右极位置C2D,设所需时间为 t1,C点的明朗瞪为 V1;而当曲柄AB再继续转过φ2时,摇杆CD自C2D摆回至C1D,设所需的时间为 t2,C点的平均速度为 V2。由于φ1>φ2,所以 t1>t2 ,V2>Vl。 由此说明:曲柄AB虽作等速转动,而摇杆CD空回行程的平均速度却大于工作行程的平均速度,这种性质称为机构的急回特性。 摇杆CD的两个极限位置间的夹角ψ称为摇秆的最大摆角,主动曲柄在摇杆处于两个极限位置时所夹的锐角θ称为极位夹角。 在某些机械中(如牛头刨床、插床或惯性筛等),常利用机械的急回特性来缩短空回行程的时间,以提高生产率。 急回特性系数K:从动件空回行程平均速度V2与从动件工作行程平均速度V1的比值。K值的大小反映了机构的急回特性,K值愈大,回程速度愈快。 K=V2/V1 =(C2C1/t2) / (C1C2/t1) =(180°十θ)/ (180°一θ) 由上式可知,K与θ有关,当θ=0时,K=1,说明该机构无急回特性;当θ>0时,K>l,则机构具有急回特性。 (六)、死点 以摇杆作为主动件的曲柄摇杆机构。在从动曲柄与连杆共线的两个位置时,出现了机构的传动角γ=0,压力角α=90°的情况。此时连杆对从动曲柄的作用力恰好通过其回转中心不能推动曲柄转动,机构的这种位置称为死点。机构在死点位置时由于偶然外 力的影响,也可能使曲柄转向不定。 死点对于转动机构是不利的,常利用惯性来通过死点,也可采用机构错排的方法避开死点。 但死点也有可利用的一面,当工件被夹紧后,BCD成一直线,机构处于死点位置,即使工件的反力很大,夹具也不会自动松脱。 学生观察小结 本课时讲解了铰链四杆机构的组成和基本形式,要求同学们重点掌握曲柄存在的条件,分析曲柄摇杆机构,双曲柄机构,双摇杆机构的工作原理和应用, 要求同学们了解铰链四杆机构的演化形式。任务实施 观察、演示、帮助、启发、调协 教师巡视指导协调任务交流 分组讨论交流 展开更多...... 收起↑ 资源预览
 资源预览
资源预览
 资源预览
资源预览