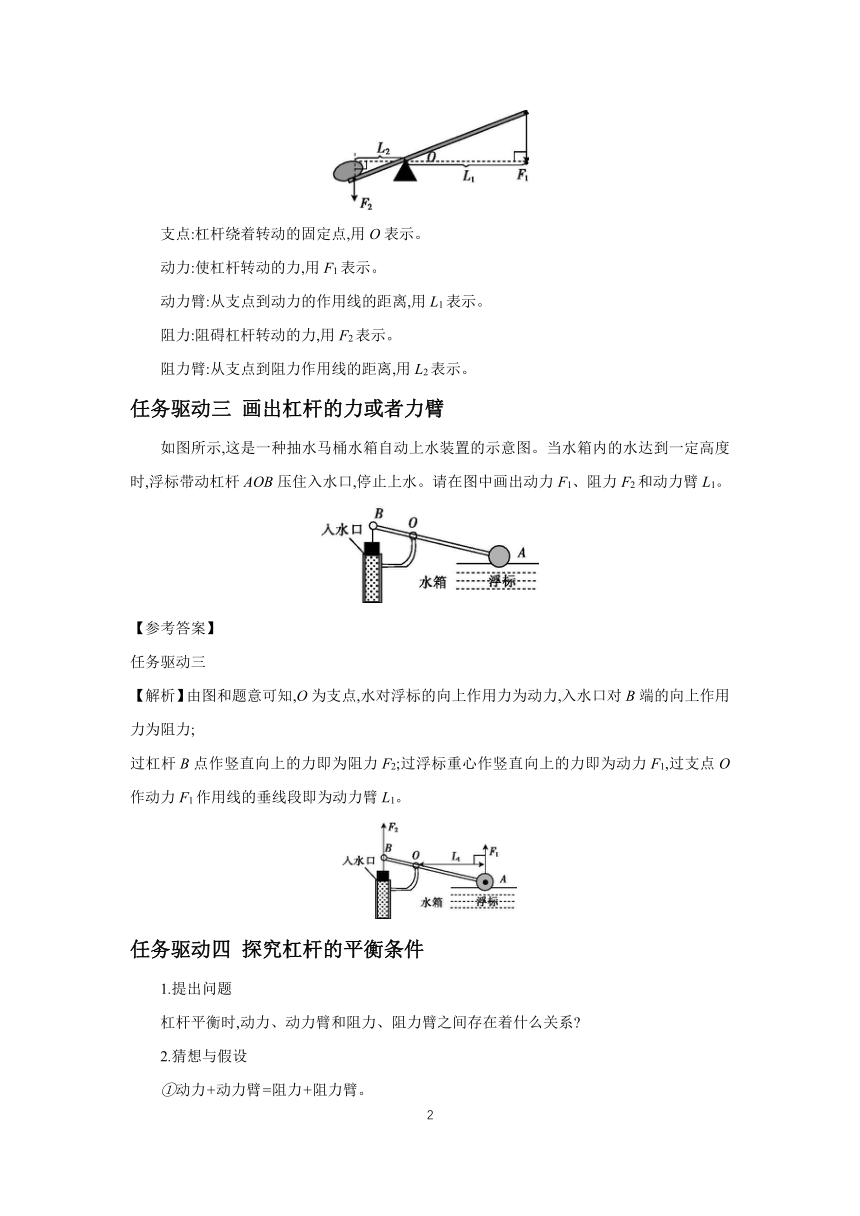
资源简介 10.1 第1课时 认识杠杆 杠杆的平衡素养目标1.知道什么是杠杆,能根据实物画出杠杆的示意图。2.通过科学探究,能对杠杆平衡条件进行猜想与假设,并设计出验证方案,对获得的信息进行处理,得出杠杆平衡的条件。◎重点:杠杆概念的建立;杠杆平衡条件的探究。【合作探究】生活中的物理跷跷板可是我们小时候的最爱了,幼儿园里每天都有和同学们一起玩这款游戏的记忆。为什么两个同学坐上去后,一会儿左边翘起来,一会儿右边翘起来,有时候两个人还会悬在半空中笑嘻嘻地一动不动呢 【问题】小朋友是如何控制跷跷板左右翘起的呢 任务驱动一 认识杠杆杠杆特点 (1)都是一根“硬棒”;(2)使用时它们都在力的作用下绕固定点转动结论 在物理学中,这种在 的作用下能绕着 转动的 就称为杠杆 【参考答案】任务驱动一力 固定点 硬棒任务驱动二 认识杠杆的五要素 支点:杠杆绕着转动的固定点,用O表示。动力:使杠杆转动的力,用F1表示。动力臂:从支点到动力的作用线的距离,用L1表示。阻力:阻碍杠杆转动的力,用F2表示。阻力臂:从支点到阻力作用线的距离,用L2表示。任务驱动三 画出杠杆的力或者力臂如图所示,这是一种抽水马桶水箱自动上水装置的示意图。当水箱内的水达到一定高度时,浮标带动杠杆AOB压住入水口,停止上水。请在图中画出动力F1、阻力F2和动力臂L1。【参考答案】任务驱动三【解析】由图和题意可知,O为支点,水对浮标的向上作用力为动力,入水口对B端的向上作用力为阻力;过杠杆B点作竖直向上的力即为阻力F2;过浮标重心作竖直向上的力即为动力F1,过支点O作动力F1作用线的垂线段即为动力臂L1。任务驱动四 探究杠杆的平衡条件1.提出问题杠杆平衡时,动力、动力臂和阻力、阻力臂之间存在着什么关系 2.猜想与假设①动力+动力臂=阻力+阻力臂。②动力-动力臂=阻力-阻力臂。③=。④动力×动力作用点到支点的距离=阻力×阻力作用点到支点的距离。⑤动力×动力臂=阻力×阻力臂。·学习小助手·改变动力可以通过改变钩码的格数实现,改变动力臂可以通过改变钩码的位置实现,改变阻力可以通过改变弹簧测力计的拉力实现,改变阻力臂可以通过改变弹簧测力计的位置实现。 3.实验器材及装置 支架(或铁架台)、弹簧测力计、相同质量的钩码数个、带刻度的杠杆、细线若干,其他常规器具自备(如笔等)。4.设计实验如图所示,在杠杆支点的一侧挂钩码,在支点另一侧用手通过弹簧测力计拉住杠杆,研究在什么条件下杠杆能够平衡。设弹簧测力计对杠杆的拉力为动力,钩码对杠杆的拉力为阻力。 5.进行实验与收集证据(1)安装好杠杆,调节杠杆两端的平衡螺母,使杠杆在水平位置平衡;(2)在支点左边某刻度(如20 cm)处挂几个钩码,在支点右边某刻度(如15 cm)处用弹簧测力计沿竖直方向拉住杠杆,使杠杆在水平位置平衡,读出弹簧测力计的示数,并将这一步的实验数据记录到表格中;(3)改变力和力臂重复操作a.钩码和弹簧测力计的位置保持不变,改变钩码的数量,读出弹簧测力计的示数,并记录;b.钩码的数量和位置保持不变,改变弹簧测力计的位置,读出弹簧测力计的示数,并记录;c.钩码的数量和弹簧测力计的位置不变,改变钩码的位置,读出弹簧测力计的示数,并记录数据。次数 F1/N L1/m F2/N L2/m1234 6.分析实验数据并得出结论对上表中记录的实验数据进行分析处理,同上面的猜想与假设对照,可以发现在误差允许的范围内,每次实验中动力与动力臂的乘积都 阻力与阻力臂的乘积。得出杠杆的平衡条件为 ,用字母表示为 。 7.交流与讨论1.杠杆的平衡是指杠杆处于什么状态 2.实验前,为什么要将杠杆调至水平位置平衡 3.实验过程中,为什么还要让杠杆在水平位置平衡 4.你现在能回答小朋友是如何控制跷跷板左右翘起的问题了吗 【参考答案】任务驱动四6.等于 动力×动力臂=阻力×阻力臂 F1L1=F2L27.1.杠杆静止或匀速转动。我们选择杠杆静止状态作为平衡状态,是为了让操作更加简单。2.使杠杆自身的重心调到支点上,这样杠杆重力与其力臂乘积为零,就避免了杠杆自身的重力对杠杆平衡的影响。3.直杠杆在水平位置平衡,量得支点到钩码的距离就是力臂,从杠杆上的刻度值直接读出。杠杆如果不水平,则支点到钩码的距离就不是力臂,所以这样便于在杠杆上直接读出力臂的大小。4.原来跷跷板相当于杠杆,杠杆的动力和阻力分别是小孩对跷跷板的压力(大小等于重力),根据杠杆的平衡条件可知要实现跷跷板的平衡F1L1=F2L2,质量大的小朋友要离支点近一些,且可以通过调节对跷跷板压力的力臂来打破杠杆的平衡使杠杆转动。2 展开更多...... 收起↑ 资源预览
 资源预览
资源预览

 资源预览
资源预览