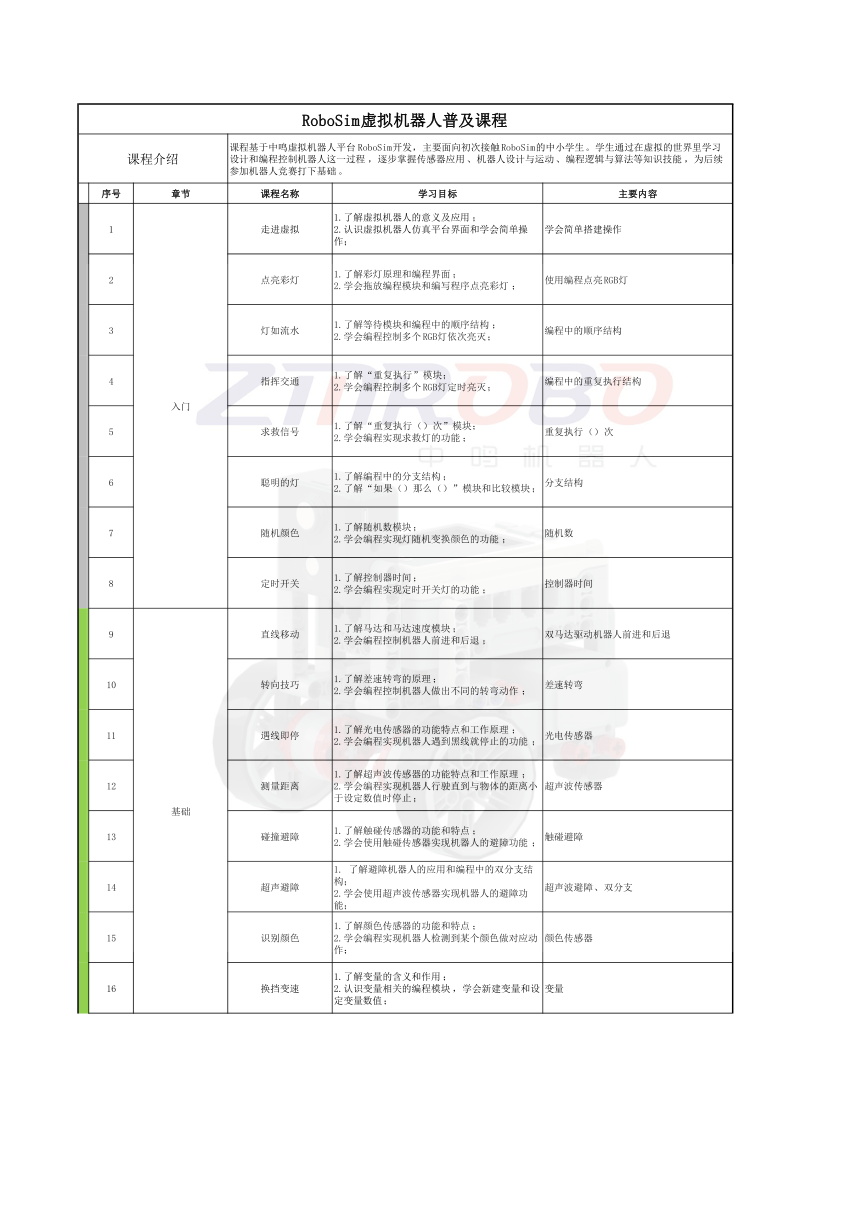
资源简介 RoboSim虚拟机器人普及课程课程基于中鸣虚拟机器人平台 RoboSim开发,主要面向初次接触RoboSim的中小学生。学生通过在虚拟的世界里学习课程介绍 设计和编程控制机器人这一过程,逐步掌握传感器应用、机器人设计与运动、编程逻辑与算法等知识技能,为后续参加机器人竞赛打下基础。序号 章节 课程名称 学习目标 主要内容1.了解虚拟机器人的意义及应用;1 走进虚拟 2.认识虚拟机器人仿真平台界面和学会简单操 学会简单搭建操作作;1.了解彩灯原理和编程界面;2 点亮彩灯 使用编程点亮RGB灯2.学会拖放编程模块和编写程序点亮彩灯 ;1.了解等待模块和编程中的顺序结构 ;3 灯如流水 编程中的顺序结构2.学会编程控制多个RGB灯依次亮灭;1.了解“重复执行”模块;4 指挥交通 编程中的重复执行结构2.学会编程控制多个RGB灯定时亮灭;入门1.了解“重复执行()次”模块;5 求救信号 重复执行()次2.学会编程实现求救灯的功能;1.了解编程中的分支结构;6 聪明的灯 分支结构2.了解“如果()那么()”模块和比较模块;1.了解随机数模块;7 随机颜色 随机数2.学会编程实现灯随机变换颜色的功能 ;1.了解控制器时间;8 定时开关 控制器时间2.学会编程实现定时开关灯的功能;1.了解马达和马达速度模块;9 直线移动 双马达驱动机器人前进和后退2.学会编程控制机器人前进和后退;1.了解差速转弯的原理;10 转向技巧 差速转弯2.学会编程控制机器人做出不同的转弯动作 ;1.了解光电传感器的功能特点和工作原理 ;11 遇线即停 光电传感器2.学会编程实现机器人遇到黑线就停止的功能 ;1.了解超声波传感器的功能特点和工作原理 ;12 测量距离 2.学会编程实现机器人行驶直到与物体的距离小 超声波传感器于设定数值时停止;基础1.了解触碰传感器的功能和特点;13 碰撞避障 触碰避障2.学会使用触碰传感器实现机器人的避障功能 ;1. 了解避障机器人的应用和编程中的双分支结构;14 超声避障 超声波避障、双分支2.学会使用超声波传感器实现机器人的避障功能;1.了解颜色传感器的功能和特点;15 识别颜色 2.学会编程实现机器人检测到某个颜色做对应动 颜色传感器作;1.了解变量的含义和作用;16 换挡变速 2.认识变量相关的编程模块,学会新建变量和设 变量定变量数值;1.了解或模块的功能和特点;17 防止跌落 2.学会运用光电传感器实现机器人的防跌落功 或模块能;1.了解“与”模块的功能和特点;18 辅助停车 2.学会运用超声波和光电传感器实现辅助停车的 超声波+光电、与模块功能;1.了解编程中的并列分支的意义;19 限位往返 两个触碰传感器应用、并列分支2.学会两个触碰传感器的配合使用;1.了解多重并列分支结构;20 变色技能 触碰+彩灯应用、多个并列分支2.学会编程实现让彩灯发出所检测颜色的功能 ;提高1.了解加减乘除运算编程模块;21 估算游戏 四则运算编程模块2.学会使用机器人验证乘法运算的估算结果 ;1.了解“不成立”模块的功能和特点;22 过线减速 不成立2.学会编程实现机器人经过黑线时减速 ;1.了解巡线送餐机器人的功能和特点 ;23 沿线行走 2.理解机器人使用一个光电传感器巡线的程序逻 单光电巡线辑;1.了解编程中的嵌套分支结构;24 巡S路线 2.学会使用两个光电传感器实现机器人的巡线功 双光电巡线、嵌套分支结构能;1.了解直角线路的巡线方法;25 直角路线 2.学会使用三个光电传感器让机器人巡线通过直 三光电巡线角线路;1.了解重复执行直到()模块;26 跳舞闹钟 2.学会编程实现机器人在一定时间内重复完成多 重复执行直到()个动作;1.了解子程序的作用和用法;27 转向指示 子程序应用2.学会创建和调用子程序;1.了解子程序数字型参数的作用和用法 ;28 分类存放 子程序数字型参数2.学会创建和设置数字型参数;进阶1.了解子程序布尔型参数的作用和用法 ;29 测速提醒 子程序布尔型参数2.学会创建和设置布尔型参数;1.了解多任务的作用和用法;30 巡逻警车 多任务2.学会编程实现多任务程序的功能;1.了解列表的含义和作用;31 计划列表 创建列表和增加列表项目2.学会创建列表和增加列表项目;1.了解列表中的项目数和判断包含内容 ;32 幸运号码 项目数、列表内容判断2.理解在列表中添加唯一数值的程序逻辑 ; 展开更多...... 收起↑ 资源预览
 资源预览
资源预览
 资源预览
资源预览