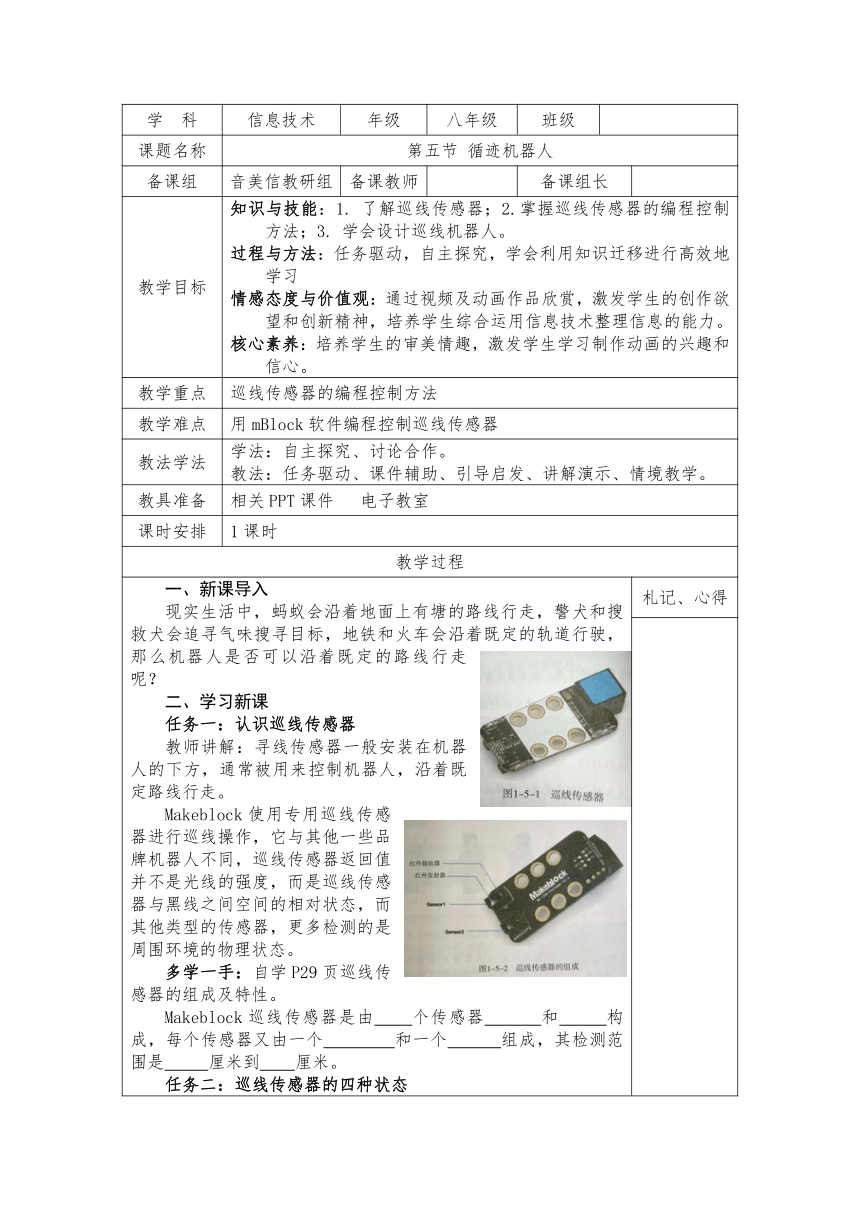
资源简介 学 科 信息技术 年级 八年级 班级课题名称 第五节 循迹机器人备课组 音美信教研组 备课教师 备课组长教学目标 知识与技能:1. 了解巡线传感器;2.掌握巡线传感器的编程控制方法;3. 学会设计巡线机器人。 过程与方法:任务驱动,自主探究,学会利用知识迁移进行高效地学习 情感态度与价值观:通过视频及动画作品欣赏,激发学生的创作欲望和创新精神,培养学生综合运用信息技术整理信息的能力。 核心素养:培养学生的审美情趣,激发学生学习制作动画的兴趣和信心。教学重点 巡线传感器的编程控制方法教学难点 用mBlock软件编程控制巡线传感器教法学法 学法:自主探究、讨论合作。 教法:任务驱动、课件辅助、引导启发、讲解演示、情境教学。教具准备 相关PPT课件 电子教室课时安排 1课时教学过程新课导入 现实生活中,蚂蚁会沿着地面上有塘的路线行走,警犬和搜救犬会追寻气味搜寻目标,地铁和火车会沿着既定的轨道行驶,那么机器人是否可以沿着既定的路线行走呢? 学习新课 任务一:认识巡线传感器 教师讲解:寻线传感器一般安装在机器人的下方,通常被用来控制机器人,沿着既定路线行走。 Makeblock使用专用巡线传感器进行巡线操作,它与其他一些品牌机器人不同,巡线传感器返回值并不是光线的强度,而是巡线传感器与黑线之间空间的相对状态,而其他类型的传感器,更多检测的是周围环境的物理状态。 多学一手:自学P29页巡线传感器的组成及特性。 Makeblock巡线传感器是由 个传感器 和 构成,每个传感器又由一个 和一个 组成,其检测范围是 厘米到 厘米。 任务二:巡线传感器的四种状态 状态1状态2状态3状态4图示说明mbot在黑线上,巡线传感器值为0,保持前进mbot偏离黑线向右,巡线传感器值为1,应向左转回到黑线上mbot偏离黑线向左,巡线传感器值为2,应向右转回到黑线上mbot不在黑线上,巡线传感器值为3,可后退寻找黑线○表示sensor接收不到红外信号●表示sensor可接收到红外信号任务二:用mblock软件编程控制巡线传感器 做中学:编程控制巡线传感器,将mbot机器人放置于浅色桌面上,一旦mbot被拿起,则持续发出报警声。 连接巡线传感器 任务分析。(见P31页) 编程设计:编制如图1-5-3所示脚本。 运行脚本: 任务三:设计巡线机器人 学习任务:分小组完成任务,在浅色平面上,让mbot机器人沿着黑色轨迹前进。(具体参考P32、33页内容) 练一练:完成巡线机器人的场地设计、机器人的安装、流程图设计、程序的编写,完成巡线任务。 三、自主探索 如果让mbot识别黑色平面上的浅色轨迹,机器人能够完成巡检任务吗?分小组探究尝试完成这个方案。 四、作业布置 P34实践与提高 札记、心得课后反思 展开更多...... 收起↑ 资源预览
 资源预览
资源预览
 资源预览
资源预览