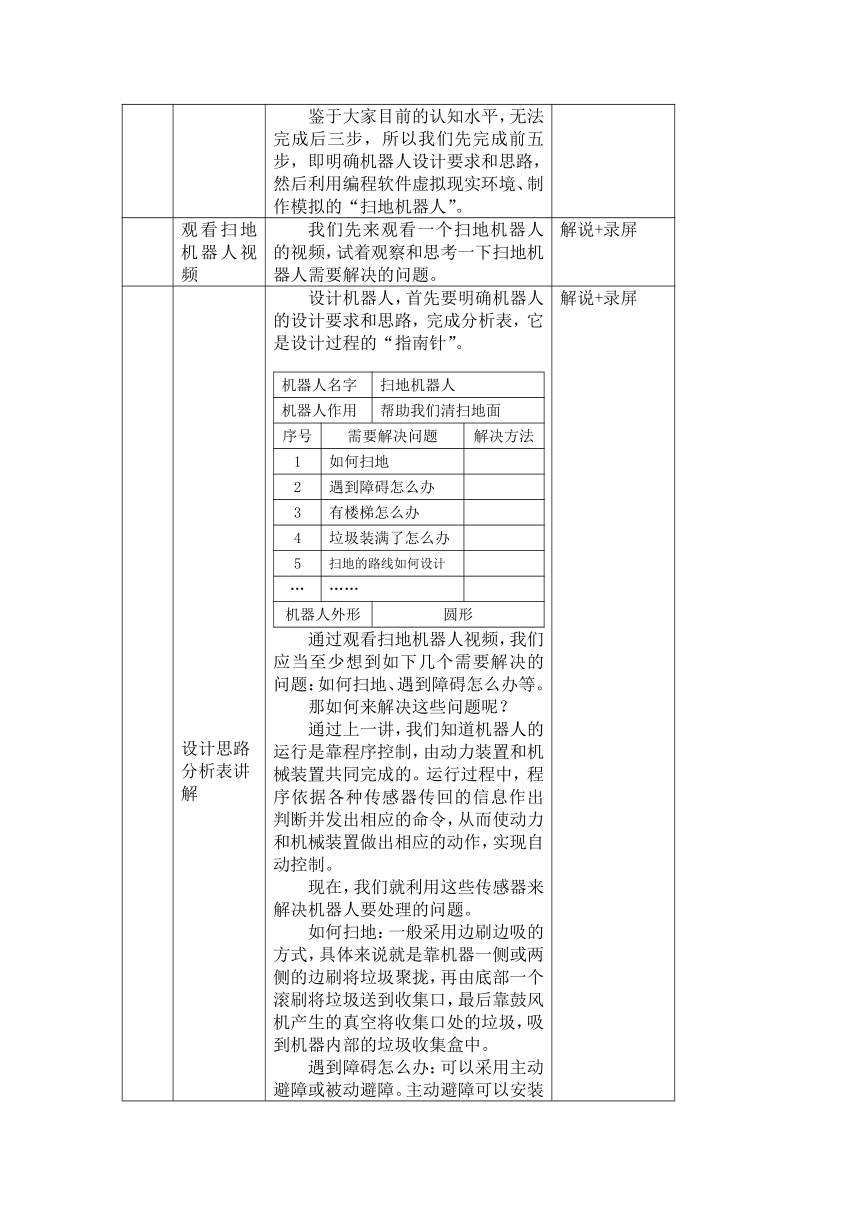
资源简介 “了解机器人的设计过程”教学设计本资源,《小学信息技术》第八版(重庆大学出版社)六年级下册《第7课 设计我们的机器人》适用一、学习目标1.了解机器人设计的过程。2.掌握“设计思路分析表”如何填写。3.感受设计过程的艰辛,初步培养善于创新、创造的实践精神。二、教学重点学习如何填写“设计思路分析表”。三、教学难点掌握“设计思路分析表”如何填写。四、教学具准备1.配套PPT。五、教学过程时间 教学环节 主要内容 呈现方式引入课题(了解机器人设计的一般过程) 丁丁、点点在编程猫的带领下战胜了未来机器人,现在他俩想通过自己学习的编程知识,为学校设计一个扫地机器人,作为毕业礼物送给学校,但是几经努力还是没有成功。 他们向编程猫寻求帮助,编程猫告诉他们设计和制作新的机器人不是件简单的事情,另外还需要一定的经费投入。 课件出示“信息窗”:机器人介绍及设计的一般过程 鉴于大家目前的认知水平,无法完成后三步,所以我们先完成前五步,即明确机器人设计要求和思路,然后利用编程软件虚拟现实环境、制作模拟的“扫地机器人”。 解说+课件录屏观看扫地机器人视频 我们先来观看一个扫地机器人的视频,试着观察和思考一下扫地机器人需要解决的问题。 解说+录屏设计思路分析表讲解 设计机器人,首先要明确机器人的设计要求和思路,完成分析表,它是设计过程的“指南针”。 机器人名字扫地机器人机器人作用帮助我们清扫地面序号需要解决问题解决方法1如何扫地2遇到障碍怎么办3有楼梯怎么办4垃圾装满了怎么办5扫地的路线如何设计………机器人外形圆形通过观看扫地机器人视频,我们应当至少想到如下几个需要解决的问题:如何扫地、遇到障碍怎么办等。 那如何来解决这些问题呢? 通过上一讲,我们知道机器人的运行是靠程序控制,由动力装置和机械装置共同完成的。运行过程中,程序依据各种传感器传回的信息作出判断并发出相应的命令,从而使动力和机械装置做出相应的动作,实现自动控制。 现在,我们就利用这些传感器来解决机器人要处理的问题。 如何扫地:一般采用边刷边吸的方式,具体来说就是靠机器一侧或两侧的边刷将垃圾聚拢,再由底部一个滚刷将垃圾送到收集口,最后靠鼓风机产生的真空将收集口处的垃圾,吸到机器内部的垃圾收集盒中。 遇到障碍怎么办:可以采用主动避障或被动避障。主动避障可以安装超声波传感器,通过发射和接收反射的回波来测距,再依据距离的大小实现主动避障。被动避障可以安装碰撞传感器,通过机器人与周边物体发生轻微碰撞,机器人就做出后退并转向。 有楼梯怎么办:可以安装一个实时测量离地距离的传感器,机器人通过监测距离的数值范围,来决定是否停止和后退。 垃圾装满了怎么办:收集垃圾的尘盒安装尘满传感器,当尘盒装满时提示取出尘盒并倾倒垃圾。 扫地的路线如何设计:可以设计随机路线和规划路线。随机路线就是在一定的时间内,机器人不断地重复执行“前行并扫地,如果碰到物品,就后退并转向”这一套动作。规划路线:机器人内置事先编写好的路线程序,比如:N字形、内螺旋形和Z字形等,然后机器人就按照设计好的某种路线进行扫地。 解说+录屏小组合作完成思路分析表 同学们,你们心中有最想设计的机器人吗?大家可以根据前面所讲的内容,尝试制订你自己心目中机器人设计思路分析表。 解说+录屏六、微课脚本1 引入课题 各位同学,大家好! 今天我们一起进入六年级下册《第7课 设计我们的机器人》的学习,一同了解一下机器人的设计过程。 我们先了解一下机器人的组成、各部分功能介绍、机器人控制流程图和机器人设计过程。 机器人一般由控制、驱动、传感系统和执行机构组成。控制系统通过处理器实现关节控制、人机交互、系统监督、算法计算等功能。驱动系统有电驱动、液压驱动和气压驱动等方式。传感系统分为内部和外部,内部系统主要有里程计、陀螺仪和加速度计等器件,外部系统主要有摄像头、红外感应器和麦克风等器件。执行机构一般有电机、伺服、传动机构等组成。 机器人各部分的功能……(依据PPT页面讲解) 机器人控制流程图……面对任务对象,外部传感器采集各项环境参数,传送给控制系统,控制系统再结合内部传感器收集的驱动、执行单元的相关参数,向驱动、执行单元发出指令,最终作用于任务对象。 机器人设计过程……(依据PPT页面讲解) 鉴于大家目前的认知水平,无法完成后三步,所以我们先完成前五步,即明确机器人设计要求和思路,然后利用编程软件虚拟现实环境、制作模拟的“扫地机器人”。 课件出示“信息窗”:机器人介绍及设计的一般过程2 观看扫地机器人视频 我们先来观看一个扫地机器人的工作视频,试着站在扫地机器人的角度,观察和思考一下它需要解决的问题。 播放视频3 设计思路分析表讲解 设计机器人,首先要明确机器人的设计要求和思路,完成分析表,它是设计过程的“指南针”。 通过观看扫地机器人视频,我们应当至少想到如下几个需要解决的问题:如何扫地、遇到障碍怎么办等。 那如何来解决这些问题呢? 通过上一讲,我们知道机器人的运行是靠程序控制,由动力装置和机械装置共同完成的。运行过程中,程序依据各种传感器传回的信息作出判断并发出相应的命令,从而使动力和机械装置做出相应的动作,实现自动控制。 现在,我们就利用这些传感器来解决机器人要处理的问题。 如何扫地:一般采用边刷边吸的方式,具体来说就是靠机器一侧或两侧的边刷将垃圾聚拢,再由底部一个滚刷将垃圾送到收集口,最后靠鼓风机产生的真空将收集口处的垃圾,吸到机器内部的垃圾收集盒中。 遇到障碍怎么办:可以采用主动避障或被动避障。主动避障可以安装超声波传感器,通过发射和接收反射的回波来测距,再依据距离的大小实现主动避障。被动避障可以安装碰撞传感器,通过机器人与周边物体发生轻微碰撞,机器人就做出后退并转向。 有楼梯怎么办:可以安装一个实时测量离地距离的传感器,机器人通过监测距离的数值范围,来决定是否停止和后退。 垃圾装满了怎么办:收集垃圾的尘盒安装尘满传感器,当尘盒装满时提示取出尘盒并倾倒垃圾。 扫地的路线如何设计:可以设计随机路线和规划路线。随机路线就是在一定的时间内,机器人不断地重复执行“前行并扫地,如果碰到物品,就后退并转向”这一套动作。规划路线:机器人内置事先编写好的路线程序,比如:N字形、内螺旋形和Z字形等,然后机器人就按照设计好的某种路线进行扫地。4 小结 机器人的设计开发,通常是以团队合作的方式进行的,一般分为若干步骤,明确机器人设计要求和思路(填写机器人设计思路分析表)是首要任务。5 探一探 根据前面所讲的内容,尝试制订你自己心目中机器人的设计思路分析表(可小组合作讨论完成)。七、作业(练习)设计教科书41页的“探一探”。同学们,你们心中有最想设计的机器人吗?大家可以根据前面所讲的内容,尝试制订你自己心目中机器人设计思路分析表。 展开更多...... 收起↑ 资源预览
 资源预览
资源预览
 资源预览
资源预览