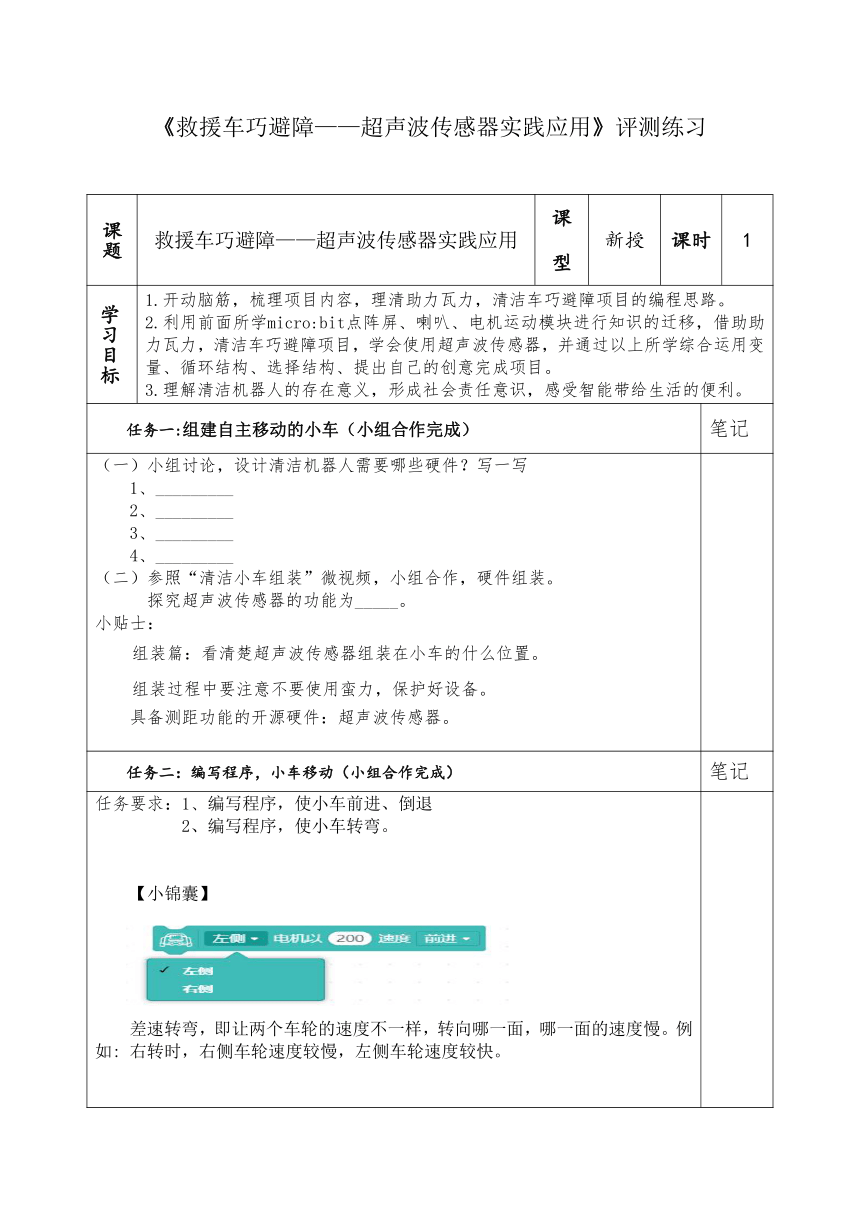
资源简介 《救援车巧避障——超声波传感器实践应用》评测练习课题 救援车巧避障——超声波传感器实践应用 课型 新授 课时 1学习目标 1.开动脑筋,梳理项目内容,理清助力瓦力,清洁车巧避障项目的编程思路。 2.利用前面所学micro:bit点阵屏、喇叭、电机运动模块进行知识的迁移,借助助力瓦力,清洁车巧避障项目,学会使用超声波传感器,并通过以上所学综合运用变量、循环结构、选择结构、提出自己的创意完成项目。 3.理解清洁机器人的存在意义,形成社会责任意识,感受智能带给生活的便利。任务一:组建自主移动的小车(小组合作完成) 笔记(一)小组讨论,设计清洁机器人需要哪些硬件?写一写 1、_________ 2、_________ 3、_________ 4、_________ (二)参照“清洁小车组装”微视频,小组合作,硬件组装。 探究超声波传感器的功能为_____。 小贴士: 组装篇:看清楚超声波传感器组装在小车的什么位置。 组装过程中要注意不要使用蛮力,保护好设备。 具备测距功能的开源硬件:超声波传感器。任务二:编写程序,小车移动(小组合作完成) 笔记任务要求:1、编写程序,使小车前进、倒退 2、编写程序,使小车转弯。 【小锦囊】 差速转弯,即让两个车轮的速度不一样,转向哪一面,哪一面的速度慢。例如: 右转时,右侧车轮速度较慢,左侧车轮速度较快。任务三:实现小车避障功能 笔记任务要求:实现小车避障功能。 【学生活动】小组合作画出流程图,积木编程搭建、测试调试程序,实现小车避障功能。 【小贴士】注意使用Max:Bot上的超声波传感器测距时要打开开关,前方距障碍物5cm-300cm范围内的测距结果比较准确。 任务拓展: 小组合作,创意提升,让你的清洁小车与众不用。评价总结 笔记我认为本组的最佳组员是______,说说理由。拓展作业: 笔记查阅资料:生活中还有哪些可以应用超声波传感器的小妙招,和你身边的人一起分享和实践。 展开更多...... 收起↑ 资源预览
 资源预览
资源预览
 资源预览
资源预览