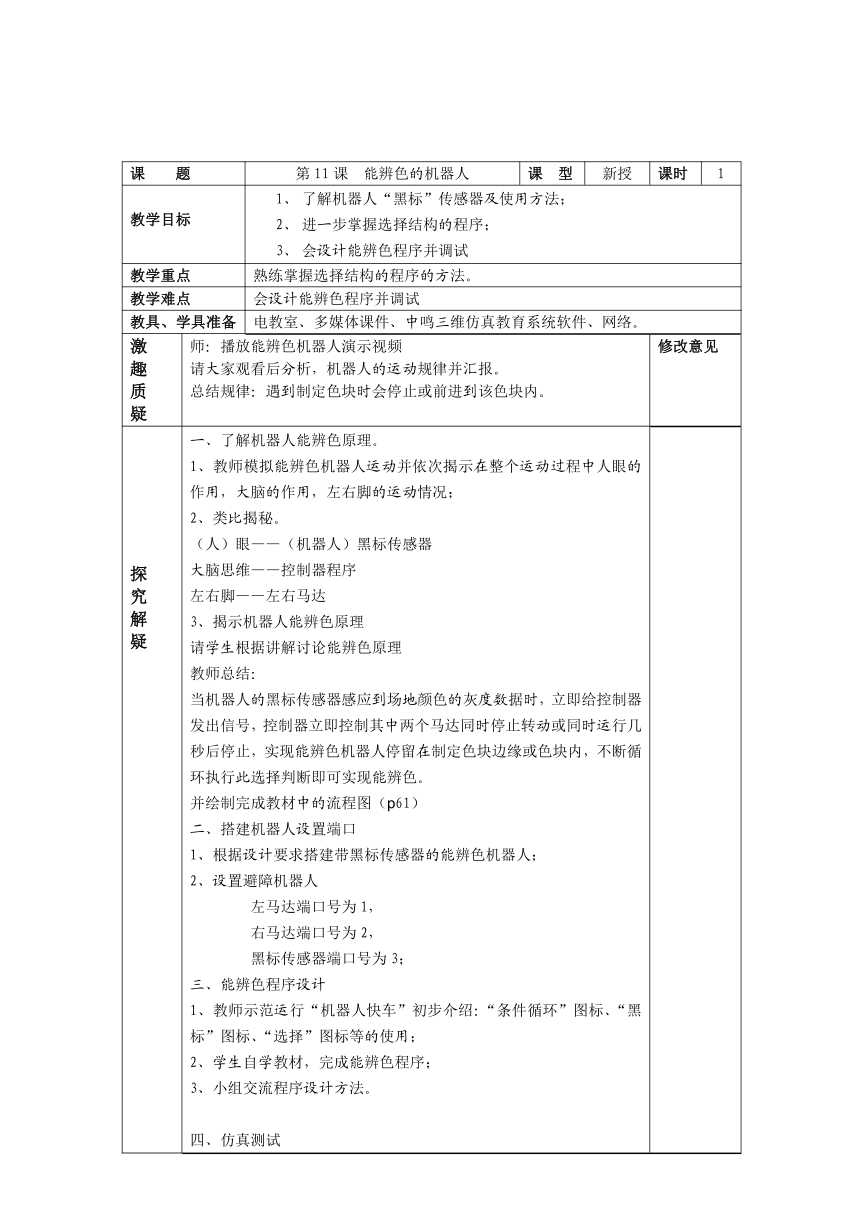
资源简介 课 题 第11课 能辨色的机器人 课 型 新授 课时 1教学目标 了解机器人“黑标”传感器及使用方法; 进一步掌握选择结构的程序; 会设计能辨色程序并调试教学重点 熟练掌握选择结构的程序的方法。教学难点 会设计能辨色程序并调试教具、学具准备 电教室、多媒体课件、中鸣三维仿真教育系统软件、网络。激 趣 质 疑 师:播放能辨色机器人演示视频 请大家观看后分析,机器人的运动规律并汇报。 总结规律:遇到制定色块时会停止或前进到该色块内。 修改意见探 究 解 疑 一、了解机器人能辨色原理。 1、教师模拟能辨色机器人运动并依次揭示在整个运动过程中人眼的作用,大脑的作用,左右脚的运动情况; 2、类比揭秘。 (人)眼——(机器人)黑标传感器 大脑思维——控制器程序 左右脚——左右马达 3、揭示机器人能辨色原理 请学生根据讲解讨论能辨色原理 教师总结: 当机器人的黑标传感器感应到场地颜色的灰度数据时,立即给控制器发出信号,控制器立即控制其中两个马达同时停止转动或同时运行几秒后停止,实现能辨色机器人停留在制定色块边缘或色块内,不断循环执行此选择判断即可实现能辨色。 并绘制完成教材中的流程图(p61) 二、搭建机器人设置端口 1、根据设计要求搭建带黑标传感器的能辨色机器人; 2、设置避障机器人 左马达端口号为1, 右马达端口号为2, 黑标传感器端口号为3; 三、能辨色程序设计 1、教师示范运行“机器人快车”初步介绍:“条件循环”图标、“黑标”图标、“选择”图标等的使用; 2、学生自学教材,完成能辨色程序; 3、小组交流程序设计方法。 四、仿真测试 1、教师演示程序编译; 2、学生效仿编译自己的能辨色程序; 3、仿真测试:分别导入场地、能辨色机器人、程序,在仿真环境中进行测试。实 践 迁 疑 四、拓展实践: 1 能辨色程序在生活中还有哪些实际用途呢? 2请了解一下还有哪些跟颜色相关的机器人传感器?资 源 卡 设 计 预习生成卡 学习探究卡 分层实践卡1、能辨色的含义? 2、能辨色机器人的工作原理? 1、能辨色机器人的搭建 2、能辨色程序的设计 3、仿真测试 1 能辨色程序在生活中还有哪些实际用途呢? 2请了解一下还有哪些跟颜色相关的机器人传感器?板书设计: 第11课 能辨色的机器人 辨色原理 人与机器人对比 程序编写及编译 仿真测试课后反思: 展开更多...... 收起↑ 资源预览
 资源预览
资源预览
 资源预览
资源预览